Raspberry Pi Zero用 三脚&カメラマウントキット「RPZ-CamMountKit-V」を発売しました
Raspberry Piはカメラコネクターを搭載しており、カメラモジュールを接続することで写真や動画を撮影できます。しかし、いずれも基板のみであるため、カメラの撮影方向を定めるためには固定する必要があります。
そこで、Raspberry Pi Zero、V3/V2カメラモジュールを三脚に固定可能な「RPZ-CamMountKit-V」を発売しました。三脚穴を搭載することで、市販の三脚や、三脚穴に対応したマウンターに固定可能となります。カメラの撮影方向を調整するのに最適です。

Raspberry Pi本体とカメラモジュールが同じ方向になるように配置されています。例えば、「RPZ-PIRS」(人感/明るさセンサー/赤外線拡張基板)と組み合わせると、人感センサーの検出方向とカメラの撮影方向を合わせることができます。人や動物が通ったのを検知してカメラで撮影する、といった応用が可能です。
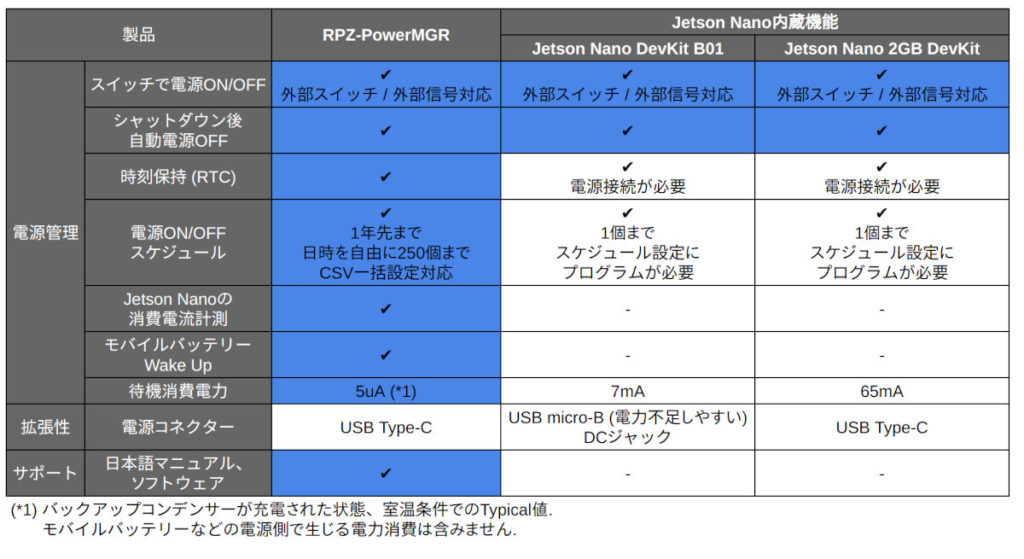
また、輪ゴムを利用するなどして電源となるモバイルバッテリーを固定することもできます。この場合、システム全てを三脚上に固定できます。モバイルバッテリーWake up対応の電源管理基板「RPZ-PowerMGR」を組み合わせると、指定時刻に起動して撮影し、シャットダウンして電力を節約するようなタイムラプス撮影システムを構築できます。こちらにサンプルプログラムを公開しているので、ぜひ参考にしてください。

本製品はRaspberry Pi Zeroシリーズ(Zero、Zero W/WH/2W)、純正のV3もしくはV2カメラモジュールに対応しています。ベースパーツ、カメラケーブル、固定用ネジ類が付属します。Raspberry Pi本体、カメラモジュール、三脚は付属しません。
HQカメラ用のマウントキットも用意しています。使い方や購入は製品ページを参照してください。