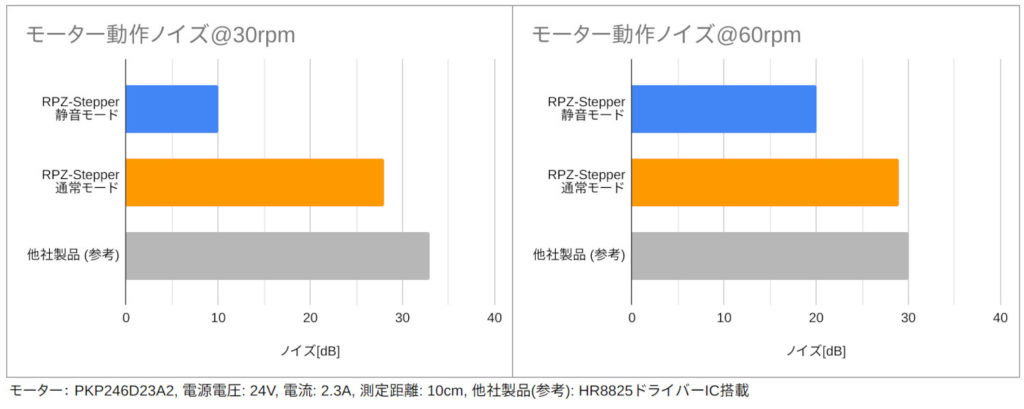
ステップ角単位で回転するという仕組み上、ステッピングモーターは振動や音が大きくなりやすい特徴があります。RPZ-Stepperは静音モードを搭載しており、振動と音を低減できます。モーターや回転数にもよりますが、動いているのかほとんどわからないレベルまで振動や音を減らすことも可能です。静かな環境で動作させるアプリケーションを実現できます。
セットアップ
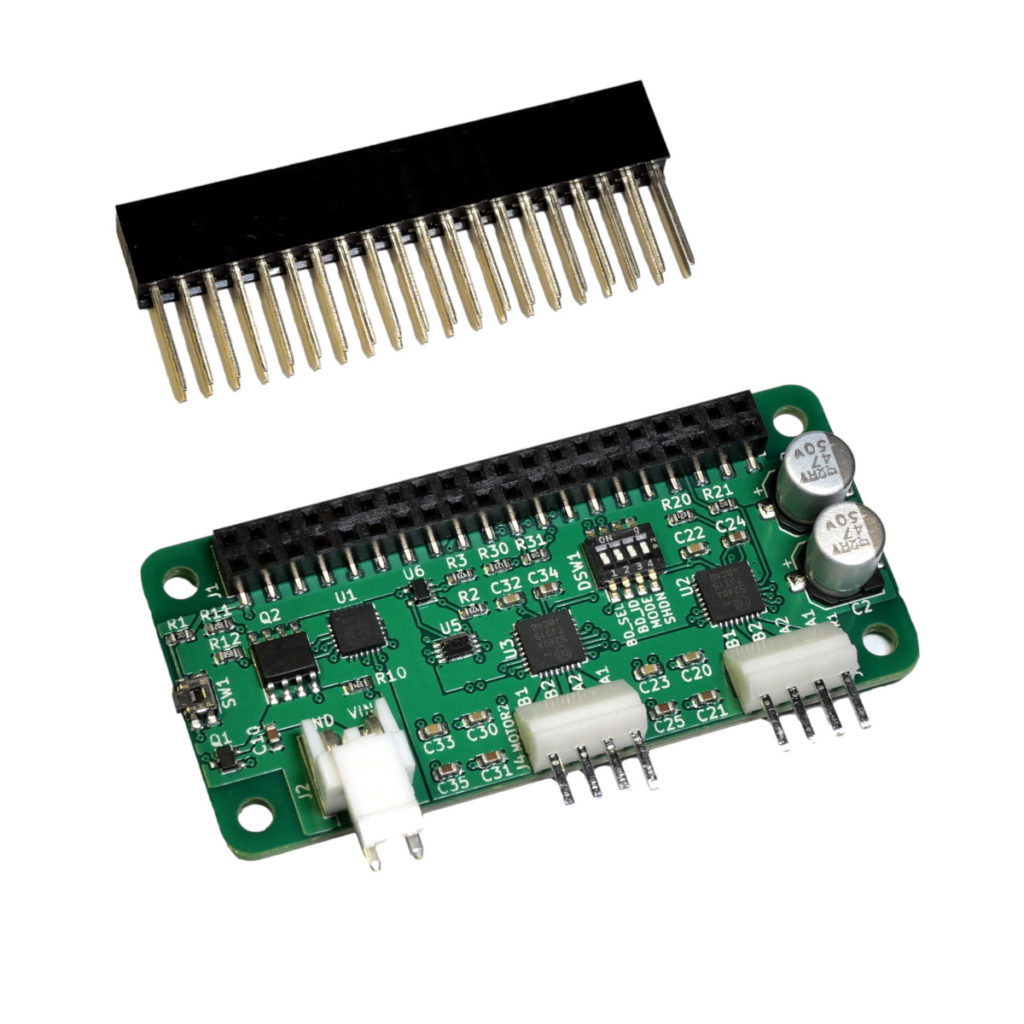
本記事では高機能モータードライバー基板「RPZ-Stepper」を使用してステッピングモーターを制御します。RPZ-Stepperの特徴、セットアップ、制御ソフトウェアのインストールは製品ページのセットアップを参照してください。
制御ソフトウェアcgstepの基本的な使い方は以下の記事で解説しています。まだの方は先に確認してください。
J3 MOTOR1端子にモーターを接続します。
Pythonでの準備
Pythonは対話モードで解説していきます。Pythonサンプルコードも用意しています。
Pythonの場合、モーター制御クラスのインスタンスを作成します。rpmで速度を指定する場合はsteps_per_revに使用モーターの1回転あたりのステップ数を指定します。省略すると200になります。
Python:
from cgstep import TMC5240
m1 = TMC5240(steps_per_rev=200)静音モードを有効にする
静音モードはen_pwm_modeに1を設定することで有効になります。TMC5240でStealthChop2と呼ばれている機能になります。
Python:
m1.en_pwm_mode = 1コマンド:
cgstep en_pwm_mode -w 1pwm_freqでPWM周波数を変更できます。通常は初期値の0から変更不要です。何らかの理由で変更したい場合は以下の表を参考に設定します。
| pwm_freq | PWM周波数[kHz] |
|---|---|
| 0 (初期値) | 24.4 |
| 1 | 36.6 |
| 2 | 48.8 |
Python:
m1.pwm_freq = 0コマンド:
cgstep pwm_freq -w 0必須の設定をしておきます。電流値ifsを0.5Aとしていますが、お使いのモーターに合わせてください。コマンドで速度を指定する場合は、-sオプションに使用モーターの1回転あたりのステップ数を指定します。省略すると200になります。
Python:
m1.ifs = 0.5
m1.vmax_rpm = 90
m1.amax = 500
m1.dmax = 500
m1.enable()コマンド:
cgstep ifs -w 0.5
cgstep vmax_rpm -w 90 -s 200
cgstep amax -w 500
cgstep dmax -w 500
cgstep enable回転させる
xtargetを設定して回転させてみます。静音モードを有効にしたことで、動作音や振動が抑えられているのが分かると思います。
Python:
m1.xtarget = 153600コマンド:
cgstep xtarget -w 153600モータードライバーは回転時の負荷や電流に応じて自動的にPWMの設定を最適化するため、ユーザー側で細かい調整は不要です。手動で調整したい場合はTMC5240データシートを参照してください。
一定速度以上で静音モードを解除する
静音モードは低速域では動作音を大きく減らす一方、回転速度が上がると動作音軽減が少なくなるほか、トルクが落ちる特徴があります。そこで、一定速度以上で自動的に静音モードを解除する機能があります。(オプション機能)
この機能を有効にするには, tpwmthrs_rpmを設定します。コマンドで指定する場合は、速度vmaxなどと同様、-sオプションに使用モーターの1回転あたりのステップ数を指定します。省略すると200になります。以下は60rpmを超えると静音モードを無効にする例です。
Python:
m1.tpwmthrs_rpm = 60
m1.xtarget = 0コマンド:
cgstep tpwmthrs_rpm -w 60 -s 200
cgstep xtarget -w 0どの程度の回転速度で無効にしたほうが良いかは使用機器によって変わります。200ステップ/回転のモーターの場合、100rpm程度を目安にすると良いと思います。
tpwmthrs_rpmを設定すると、ソフトが指定されたrpmから計算してtpwmthrsパラメーターを設定しています。vmax_rpmを指定すると実際にはvmaxが設定されるのと同様です。tpwmthrsは速度のvmaxと異なり、以下の計算式で求めます。
tpwmthrs = 16777216 ÷ 速度v200ステップ/回転のモーターの場合、60rpmのとき速度v=68720、tpwmthrs=244となります。rpmで指定する場合はソフトが自動で計算するため気にする必要はありませんが、このような仕組みになっています。
tpwmthrsに0を設定すると静音モードが常に有効な状態(切り替えが無効)に戻ります。
停止時にモーターを固定しない
静音モードで利用可能なもう一つのオプション機能を紹介します。
指定位置で停止している場合、通常ステッピングモーターはその位置で固定される力が働きます。freewheelオプションを使うと、停止時に位置を固定せず外力で回転可能な状態にすることができます。消費電力もカットできます。特に固定する必要がないアプリケーションでご利用ください。
以下の表の通り、freewheelの設定値によって動作が変わります。また、この機能は停止時の電流iholdを最低の0に設定することで有効になります。
| freewheel | 動作 |
|---|---|
| 0 (初期値) | 通常の動作。モーター位置を保持する |
| 1 | フリーホイール。電流を流さず、モーターが外力で回転する |
| 2 | パッシブブレーキ。電流を流さず、モーターが外力で回転するがブレーキがかかる |
フリーホイールに設定する例です。モーターの位置が固定されなくなるのが分かると思います。
Python:
m1.freewheel = 1
m1.ihold = 0コマンド:
cgstep freewheel -w 1
cgstep ihold -w 0なお、外力で回転した場合でもモータードライバー側の現在位置xactualは変わらない(回転したかどうかプログラムからは分からない)点に注意してください。
まとめ
制御ソフトウェアcgstepで、ステッピングモーター振動と音を低減させる方法の解説は以上です。RPZ-Stepperには他にも多くの機能があり、それらの解説記事も参考にしてください。

TSL2572センサーとラズパイで明るさ(照度)を測定する
Indoor Corgiのセンサー制御ソフトウェア「cgsensor」を利用して、TSL2572センサーで明るさを測定する方法を解説します。コマンドラインツールを使って1行もコードを書かずに測定ができるほか、Pythonパッケージを使えばご自身のプログラムから簡単にセンサーを制御できます。

定期撮影ラズパイカメラをモバイルバッテリーで長期運用 (RPZ-PowerMGR)
Raspberry Pi(ラズパイ)と純正カメラを使用して、定期的に撮影するタイムラプス機能を実装する方法を解説します。RPZ-PowerMGR拡張基板を使うことで、指定時刻に起動し、撮影後は自動的にシャットダウン&電源OFFします。待機時の消費電力をカットすることで、モバイルバッテリーで長期運用が可能になります。

Raspberry Pi用 温度/湿度/気圧/赤外線 ホームIoT拡張基板「RPi TPH Monitor」
動作をプログラミング可能な、Raspberry Pi(ラズパイ)用ホームIoT拡張ボードです。温度、湿度、気圧センサー、赤外線送信、受信機能を搭載。温度が上がったらエアコンをオンにする、外出先から家電の操作をする、気温や湿度を記録する、といった使い方が可能です。ディスプレイやLEDに情報表示、スイッチを押したら特定の処理をすることもできます。