RPZ-Stepperは基板1枚に2台のステッピングモーターを接続でき、最大で基板2枚、モーター4台を制御できます。本記事では、制御ソフトウェアcgstepで複数ステッピングモーターを制御する方法を解説しています。複数台のモーターを使うことでX/Y/Z軸移動など複雑な動きを実現できます。
更新日 : 2024年1月3日セットアップ
本記事では高機能モータードライバー基板「RPZ-Stepper」を使用してステッピングモーターを制御します。RPZ-Stepperの特徴、セットアップ、制御ソフトウェアのインストールは製品ページを参照してください。
制御ソフトウェアcgstepの基本的な使い方は以下の記事で解説しています。まだの方は先に確認してください。
基板1枚の場合と基板2枚の場合に分けて解説します。
基板1枚の場合は、両方のコネクターにモーターを接続します。
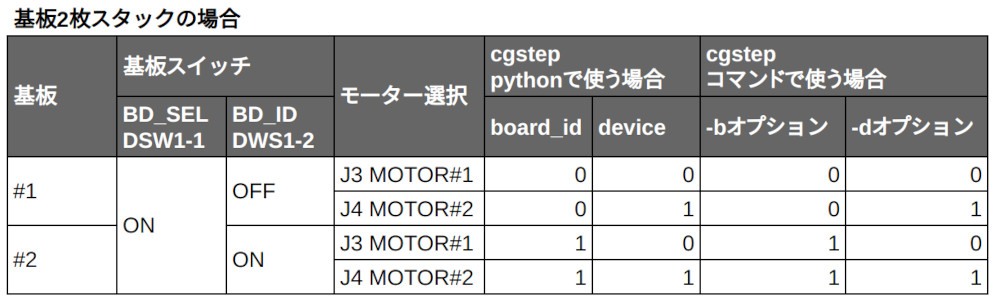
基板2枚の場合、今回の例ではBD_IDがOFFの基板のJ3 MOTOR1端子、およびBD_IDがOFFの基板のJ4 MOTOR2端子にモーターを接続します。基板2枚の場合、ボード選択とBD_IDスイッチを設定しておく必要があります。セットアップ(ハードウェア)の手順をご確認ください。
基板1枚の場合
Pythonは対話モードで解説していきます。Pythonサンプルコードも用意しています。
Pythonの場合、TMC5240クラスのインスタンス作成時にdevice引数に0か1を指定します。(何も指定しないと0になります)
コマンドの場合、「-d」オプションに0か1を指定します。(何も指定しないと0になります)
0を指定するとJ3 MOTOR1端子のモーター1、1を指定するとJ4 MOTOR2端子のモーター2に対する操作となります。
Python:
from cgstep import TMC5240
m1 = TMC5240(device=0)
m2 = TMC5240(device=1)コマンド:
cgstep -d 0 ...
cgstep -d 1 ...各モーターごとにモータードライバーICは独立しています。そのため、両方のモーターについてパラメーターを設定する必要があります。以下はモーター1とモーター2にそれぞれパラメーターを設定する例です。電流値ifsを0.5Aとしていますが、お使いのモーターに合わせてください。
Python:
モーター1
m1.ifs = 0.5
m1.vmax_rpm = 60
m1.amax = 500
m1.dmax = 500
m1.enable()モーター2
m2.ifs = 0.5
m2.vmax_rpm = 30
m2.amax = 300
m2.dmax = 300
m2.enable()コマンド:
モーター1
cgstep -d 0 ifs -w 0.5
cgstep -d 0 vmax_rpm -w 60
cgstep -d 0 amax -w 500
cgstep -d 0 dmax -w 500
cgstep -d 0 enableモーター2
cgstep -d 1 ifs -w 0.5
cgstep -d 1 vmax_rpm -w 30
cgstep -d 1 amax -w 300
cgstep -d 1 dmax -w 300
cgstep -d 1 enableモーター1を3回転、モーター2を1回転させてみます。
Python:
m1.xtarget = 153600
m2.xtarget = 51200コマンド:
cgstep -d 0 xtarget -w 153600
cgstep -d 1 xtarget -w 51200元の位置に戻します。
Python:
m1.xtarget = 0
m2.xtarget = 0コマンド:
cgstep -d 0 xtarget -w 0
cgstep -d 1 xtarget -w 0基板2枚の場合
Pythonは対話モードで解説していきます。Pythonサンプルコードも用意しています。
Pythonの場合、TMC5240クラスのインスタンス作成時に、board_idとdevice引数にそれぞれ0か1を指定します。board_idで基板を選択、deviceで基板上コネクターを選択します。
コマンドの場合、「-b」と「-d」オプションそれぞれに0か1を指定します。-bで基板を選択、-dで基板上コネクターを選択します。
組み合わせにより、以下の表の対応したモーターが操作できます。
Python:
from cgstep import TMC5240
m1 = TMC5240(board_id=0, device=0)
m2 = TMC5240(board_id=0, device=1)
m3 = TMC5240(board_id=1, device=0)
m4 = TMC5240(board_id=1, device=1)コマンド:
cgstep -b 0 -d 0 ...
cgstep -b 0 -d 1 ...
cgstep -b 1 -d 0 ...
cgstep -b 1 -d 1 ...今回の例では基板#1のMOTOR#1をモーター1、基板#2のMOTOR#2をモーター4として、この2つを操作する手順を示します。他のモーターの操作も同様です。
各モーターごとにモータードライバーICは独立しています。そのため、両方のモーターについてパラメーターを設定する必要があります。以下はモーター1とモーター4にそれぞれパラメーターを設定する例です。電流値ifsを0.5Aとしていますが、お使いのモーターに合わせてください。
Python:
モーター1
m1.ifs = 0.5
m1.vmax_rpm = 60
m1.amax = 500
m1.dmax = 500
m1.enable()モーター4
m4.ifs = 0.5
m4.vmax_rpm = 30
m4.amax = 300
m4.dmax = 300
m4.enable()コマンド:
モーター1
cgstep -b 0 -d 0 ifs -w 0.5
cgstep -b 0 -d 0 vmax_rpm -w 60
cgstep -b 0 -d 0 amax -w 500
cgstep -b 0 -d 0 dmax -w 500
cgstep -b 0 -d 0 enableモーター4
cgstep -b 1 -d 1 ifs -w 0.5
cgstep -b 1 -d 1 vmax_rpm -w 30
cgstep -b 1 -d 1 amax -w 300
cgstep -b 1 -d 1 dmax -w 300
cgstep -b 1 -d 1 enableモーター1を3回転、モーター4を1回転させてみます。
Python:
m1.xtarget = 153600
m4.xtarget = 51200コマンド:
cgstep -b 0 -d 0 xtarget -w 153600
cgstep -b 1 -d 1 xtarget -w 51200元の位置に戻します。
Python:
m1.xtarget = 0
m4.xtarget = 0コマンド:
cgstep -b 0 -d 0 xtarget -w 0
cgstep -b 1 -d 1 xtarget -w 0まとめ
制御ソフトウェアcgstepで複数ステッピングモーターを制御する方法の解説は以上です。複数台のモーターを使うことでX/Y/Z軸移動など複雑な動きを実現できます。RPZ-Stepperには他にも多くの機能があり、それらの解説記事も参考にしてください。

人感センサーとラズパイで人や動物が通ったら撮影する (RPZ-PIRS)
人感センサー(PIR/焦電赤外線センサー)は、人や動物の動きを検知できます。そこで、Raspberry Pi(ラズパイ)、カメラと組み合わせて、人や動物が通ったら写真や動画を撮影する方法を解説します。実際に動作するプログラムも用意しています。人感センサー搭載のRPZ-PIRS拡張基板を利用します。

ラズパイ/Jetsonの消費電力測定&モバイルバッテリー稼働時間の計算 (RPZ-PowerMGR)
RPZ-PowerMGRを使って、Raspberry Pi(ラズパイ)/Jetson Nanoの消費電力を測定する方法の解説です。モバイルバッテリーでの運用可能な時間を計算し、実際の運用時間と比較しました。

RPZ-IR-Sensor (Raspberry Pi用 温度/湿度/気圧/明るさ/赤外線 ホームIoT拡張ボード)
動作をプログラミング可能な、Raspberry Pi/Zero(ラズパイ)用ホームIoT拡張ボードです。温度、湿度、気圧、明るさセンサー、赤外線送受信機能を搭載。温度が上がったらエアコンをオンにする、暗くなったら照明を点灯する、外出先から家電の操作をする、気温や日照時間を記録する、といった使い方が可能です。LEDにステータスを表示したり、スイッチを押したら特定の処理をすることもできます。